성과
08
건축 실내 바닥 미장(방바닥 통미장) 로봇
Representation and Photography
Main Contents
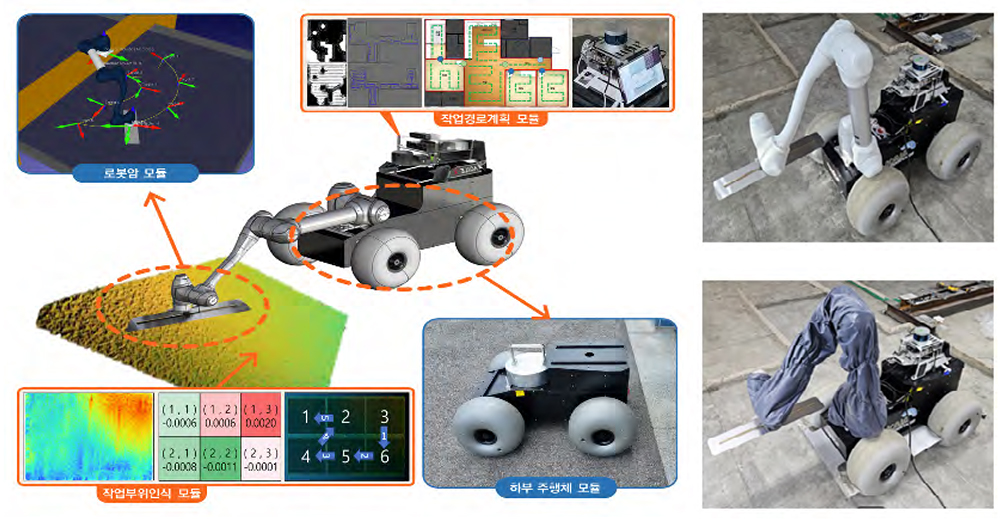
건축 실내 바닥 미장 로봇을 구성하는 핵심 모듈
-
미장 작업 로봇암 모듈 (미장작업 수행)
- 실제 바닥 미장작업을 수행하는 모듈. 로봇암 모듈은 Manipulator 부분과 End-effector 부분으로 구성되며, 작업부위인식 모듈을 통해 인식된 작업부위의 상태에 따라 적절한 작업방법을 선정하여 미장작업을 수행
-
작업부위인식 모듈 (작업 전/후 모르타르 상태 파악)
- 미장로봇이 작업을 수행하기 전/후 로 모르타르면의 상태를 인식하고 작업계획을 수립하거나 작업품질을 판단하는 모듈을 의미
-
작업경로계획 모듈 (자율주행 및 실내 작업경로 생성)
- 건축 실내 바닥공사의 특징을 고려하여 로봇의 이동을 위한 최적의 작업 경로계획을 수립하는 모듈이며 자율주행을 위한 Localization 기능과 Navigation 기능을 포함
-
하부 주행체 모듈 (굳지않은 모르타르 표면 주행)
- 로봇이 자율/반자율로 이동할 수 있도록하는 하부 주행체 모듈. 하부 주행체 모듈은 로봇이 굳지않은 모르타르 위를 안정적으로 이동할 수 있어야 하며 작업경로계획 모듈에서 생성한 경로에 따라 정확히 이동가능
Distinction
- 디지털 시공감리 솔루션 플랫폼 내 축적된 감리 데이터를 활용하여 개발한 KPI 성과 평가 시스템을 기반으로 건설현장 성과 달성 현황을 정량적으로 측정
| 구분 | 장비/기업 명 | 사진 | 운영방식 | 작업방법 | 작업품질 | 대상작업 |
|---|---|---|---|---|---|---|
| 기존 기술 | 외발기/ 쌍발기 |

|
인력조정 | 외발/쌍발 미장날 회정 |
3m당 ±10~7mm | 슬라브 콘크리트 표면 미장 |
| 현대 엔지니어링 |

|
무선조정 및 자율주행 | 회전 트로웰 방식 | 3m당 ±10~7mm | 슬라브 콘크리트 표면 미장 | |
| 일본 Taisei |

|
무선조정 | 회전 트로웰 방식 | 3m당 ±10~7mm | 슬라브 콘크리트 표면 미장 | |
| 미국 Tibroc CF-40 |
|
무선조정 | 회전 트로웰 방식 | 3m당 ±10~7mm | 슬라브 콘크리트 표면 미장 | |
| 개발 기술 | 건축 실내 바닥미장 로봇 |

|
협동로봇 (자율/반자율) |
로봇암 미장 방식 | 3m당 ±10~7mm | 슬라브 콘크리트 표면 미장 and 실내 바닥미장 |
Expectation Effectiveness
-
(자동화를 통한 작업자 안전 확보)
- 건축 실내 바닥 미장 작업은 노동집약적이며 높은 작업난이도 및 열약한 작업환경을 가지는 공종으로 해당작업을 자동화할 경우 해당 작업으로 인한 질병사고를 근본적으로 예방 가능
-
(국내 건설 자동화 원천기술 확보)
- 로봇을 구성하는 핵심모듈(로봇암 모듈, 작업부위인식 모듈, 작업경로계획 모듈, 주행체 모듈)은 추후 다양한 시공자동화 로봇 개발을 위한 원천기술로 활용 가능하므로 국내 시공자동화 로봇 기술 발전에 기여
-
(생산성 향상)
- 인간-로봇 협업의 최적화를 통해 미장작업 생산성뿐 아니라 실내 바닥 미장 작업 전체 프로세스의 생산성 또한 향상될 것으로 기대

