기술
04
건축 시공 자동화 로봇
Definition
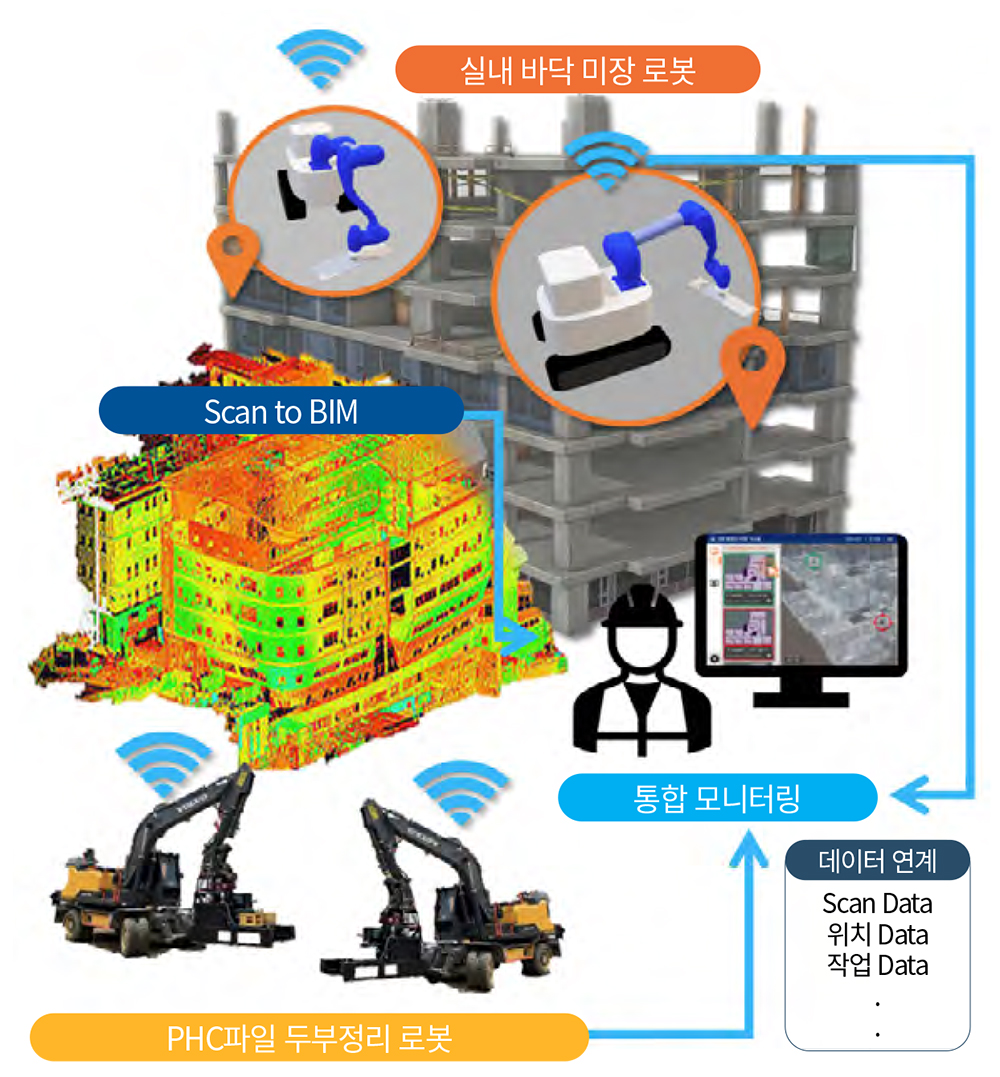
건축 시공자동화 장비/로봇 통합 플랫폼 및 모니터링 시스템
- 로봇 연계형 라이다 및 AI Vision을 이용한 건축현장 As·Built BIM 모델(Global) 구축기술
- 건축물 실내외 작업 자동화 장비/로봇의 실시간 통합모니터링 기술
건축 내부 바닥 미장 자동화 로봇
- 건축 내부 바닥공사(바닥 모르타르 등)를 위한 다목적·다기능·다관절 로봇 개발
- 건축 내부 바닥공사의 작업부위 인식 및 작업 계획 모듈 개발
- 건축 내부 바닥공사 작업을 위한 자율/반자율 주행장치 개발
- 자동화 장비/로봇의 현장 적용성 및 시공성 향상을 위한 DFA(Design for Automation)
- 시공자동화 로봇 현장 적용 효과 분석
- 시공자동화 로봇 현장 실증
Goals
최종목표
건축 시공자동화 로봇 개발
- 건축 내부 바닥 미장(방바닥 통미장) 자동화 로봇 개발
- PHC파일 두부정리 자동화 로봇 개발
단계별 목표
-
1단계
- 건축 내부 바닥 미장 자동화 로봇의 기술/현장 요구사항 정의 및 설계와 프로토타입 개발
- PHC파일 두부정리 로봇의 파일럿타입 개발
- 축 시공자동화 장비/로봇 통합 모니터링 시스템의 기술/현장 요구사항 정의 및 설계
-
2단계
- 건축 내부 바닥 미장 자동화 로봇 개발 및 실용화/기술고도화
- PHC파일 두부정리 로봇 시제품 개발
- 건축 시공자동화 장비/로봇 통합 모니터링 시스템 개발 및 실용화/기술고도화
- 실내 작업 자동화 장비/로봇의 시공성 향상을 위한 DFA(Design for Automation) 지침 개발
- 시공자동화 로봇의 경제성, 기술적 타당성 및 현장 적용성 분석
Detailed Description
-
1. 건축 내부 바닥 미장 자동화 로봇
- 건축 내부 바닥 미장을 위한 다목적·다기능·다관절 로봇 개발
- 건축 내부 바닥 미장을 위한 작업부위인식 및 작업경로계획 모듈 개발
- 건축 내부 바닥 미장을 위한 자율/반자율 주행장치 개발
- 실내 작업 자동화 장비/로봇의 시공성 향상을 위한 DFA(Design for Automation) 지침 개발
- 시공자동화 로봇의 경제성, 기술적 타당성 및 현장 적용성 분석
- 시공자동화 로봇 현장 실증
-
2. PHC파일 두부정리 자동화 로봇
- PHC파일 두부정리 작업을 위한 센싱 모듈 개발
- PHC파일 두부정리 작업을 위한 어태치먼트 개발
- PHC파일 두부정리 자동화 로봇 시제품 개발
-
3. 건축 시공자동화 장비/로봇 통합 모니터링 시스템
- 로봇 연계형 라이다 AI-Vision을 이용한 건축현장 As-Built BIM 모델(Global) 구축 기술 개발
- 건축 시공자동화 장비/로봇 통합 모니터링 기술 개발
기관명단
| 구분 | 기관명 | 책임자 | 전자우편 |
|---|---|---|---|
| 기술4 | 인하대학교산학협력단 | 김정렬 | jungkim@inha.ac.kr |
| 레드원테크놀러지 주식회사 | 문용선 | moon@urc.kr | |
| 지에스건설(주) | 김효근 | hgkim6@gsenc.com |

